Wie der Name schon sagt, werden durch Gelenke die möglichen Bewegungen der Entities beschränkt. Standardmäßig sind alle Physik-Entities so beschränkt, dass sie keine Levelblöcke oder andere Entities durchdringen können. Weitere Beschränkungen sind möglich und können auf ein oder mehrere Entities angewendet werden. Die normale Prozedur, Modelle mit einem Gelenk zu verbinden, ist:
Wollen Sie zwei Objekte mit phcon_add verbinden,
vergewissern Sie sich, das sich diese in der richtigen Position befinden und
keine anderen Entities durchdrungen werden. Falls Sie sich doch ein bisschen
durchdringen, setzen Sie diese mit phent_setgroup
beide auf die gleiche Group ID. Die folgende Liste enthält alle derzeit verfügbaren
Constraints und deren benötigte Parameter. Werfen Sie dazu auch einen Blick
auf die phcon_setparams1 und
phcon_setparams2 Funktionen.
| Typ: |
|
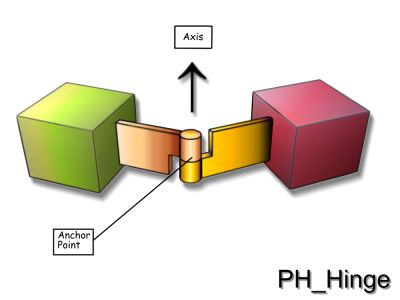
| Beschreibung : | Bei einem Scharnier haben zwei Entities dieselbe Rotationsachse und stehen in einem festen Abstand zu dieser Achse. Der Ankerpunkt und die Rotationsachse müssen festgelegt werden. Der Abstand der Entities zu dieser Achse wird beim Erstellen dieser Beschränkung festgelegt. Deswegen achten Sie darauf, dass sich die Entities an der richtigen Position befinden, bevor Sie PH_HINGE hinzufügen. Die anfängliche Ausrichtung wird als Winkel von 0° angenommen. Wenn Sie beide Entities um 90° drehen und die Winkelbegrenzung auf (0,0), dann wird die anfängliche Ausrichtung beibehalten. |
| Parameter 1 : | Ankerpunkt |
| Parameter 2 : | Drehachse, z.B. (0,0,1) |
| Parameter 3: | nullvector |
| Parameter 4 : | Erlaubte Winkel, z.B. (-45, 90 , 0) setzt die untere Grenze auf -45° und die obere auf 90°. Mit (-360, 360, 0) werden alle Winkelbeschränkungen aufgehoben. |
| Parameter 5 : | nullvector |
| Parameter 6 : | nullvector |
| Motor 1 : | Legt die gewünschte Winkelgeschwindigkeit und das maximale Drehmoment, das diese Geschwindigkeit erreichen darf, fest. Z.B. (10, 50, 0) setzt die gewünschte Winkelgeschwindigkeit auf 10 Hz und das maximale Drehmoment auf 50.000 Nm. |
| Typ: |
|
| Beschreibung : | Entities rotieren frei um den Ankerpunkt oder Verbindung zu einer Kugel. |
| Parameter 1 : | Ankerpunkt |
| Parameter 2 : | nullvector |
| Parameter 3: | nullvector |
| Parameter 4 : | nullvector |
| Parameter 5 : | nullvector |
| Parameter 6 : | nullvector |
| Motor 1 : | not available |
| Typ: |
|
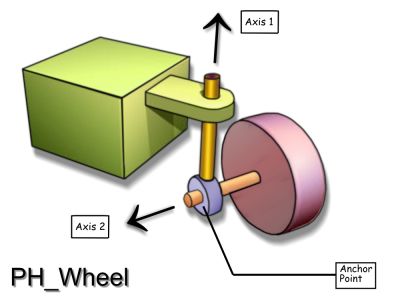
| Beschreibung : | Diese Beschränkung begrenzt die Objektbewegung um zwei Achsen. Wie der Name schon andeutet, kann diese Beschränkung dazu verwendet werden, Räder eines Fahrzeuges zu simulieren. Es kann aber auch für andere Objekte, wie z.B. einer Windmühle verwendet werden. |
| Parameter 1 : | Ankerpunkt |
| Parameter 2 : | Radachse 1 relativ zu Entity 1, z.B. (0,0,1) |
| Parameter 3: | Radachse 2 relativ zu Entity 2, z.B. (1,0,0) |
| Parameter 4 : | Erlaubte Winkel um Radachse 1, z.B. (-45, 90 , 0) setzt die untere Grenze auf -45° und die obere auf 90°. Mit (-360, 360, 0) werden alle Winkelbeschränkungen aufgehoben. |
| Parameter 5 : | nullvector |
| Parameter 6 : | nullvector oder Stossdämpferkonstante in Bereich 0..100000, z.B. (90000,100,0) |
| Motor 1 : | Legt die gewünschte Rotationsgeschwindigkeit um Radachse 1 und das maximal bei dieser Geschwindigkeit erlaubte Drehmoment fest. Z.B. (10,50,0) setzt die gewünschte Rotationsgeschwindigkeit auf 10Hz bei einem maximalen Drehmoment von 50.000 Nm. |
| Motor 2 : | Legt die gewünschte Rotationsgeschwindigkeit um Radachse 2 und das maximal bei dieser Geschwindigkeit erlaubte Drehmoment fest. Z.B. (10,50,0) setzt die gewünschte Rotationsgeschwindigkeit auf 10Hz bei einem maximalen Drehmoment von 50.000 Nm. |
| Type: |
|
| Beschreibung : | Die Entities dürfen sich entlang der Verschiebungsachse drehen oder sich an dieser entlangbewegen. Andere Bewegungen sind blockiert. |
| Parameter 1 : | Verschiebungsachse, z.B. (0,0,1) |
| Parameter 2 : | nullvector |
| Parameter 3: | nullvector |
| Parameter 4 : | Erlaubter Abstand von der Ursprungsposition, z.B. (-100,1000,0). Dies erlaubt der Entity eine Verschiebung um 1000 Quants in die eine und 100 Quants in die andere Richtung. Dies ergibt einen Verschiebebereich von 1100 Quants. |
| Parameter 5 : | nullvector |
| Parameter 6 : | nullvector |
| Motor 1 : | Legt die gewünschte lineare Geschwindigkeit und die maximale Kraft, um diese zu erreichen, fest. Negative Geschwindigkeiten drehen die Richtung um. Z.B. gibt (10, 50, 0) eine gewünschte Geschwindigkeit von 10 Quants pro Sekunde bei einer maximalen Kraft von 50.000 N an. |