| Type: |
|
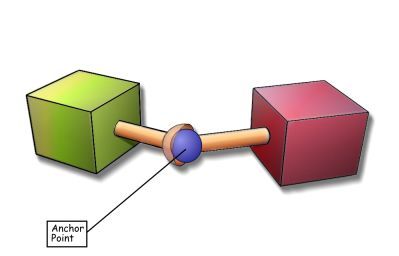
| Description : | A hinge constrains two entitites to have a common axis of rotation and to stay a fixed distance from this axis. As depicted in the image above, you need to specify this rotation axis and an anchor point on said axis. The distance from each entity to the axis is determined when you first create the constraint. Therefore make sure to place the entities in the right position, before adding the hinge. The initial orientation is also taken as an angle value of zero degrees. Thus if both entities are rotated by 90 degrees with respect to each other and you set the angle limit to (0,0) they will remain in the initial orientation. |
| Parameter 1 : | Anchor point |
| Parameter 2 : | Hinge axis, e.g. (0,0,1) |
| Parameter 3: | nullvector |
| Parameter 4 : | Allowed angles, e.g. (-45, 90, 0) sets the lower limit to -45 degrees and the upper limit around the axis to +90 degrees. Use (-360, 360, 0) to remove all limits. |
| Parameter 5 : | nullvector |
| Parameter 6 : | nullvector |
| Motor 1 : | Set desired angular velocity and the maximum torque allowed to achieve this velocity, e.g. (10, 50,0) will set a desired angular velocity of 10 Hz and a maximum torque of 50,000 Nm |
| Type: |
|
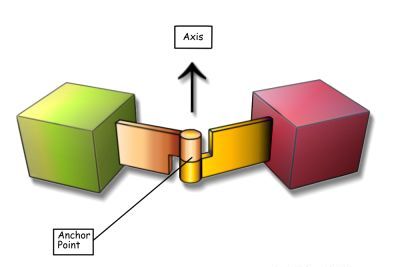
| Description : | Description: Entities rotate freely around the balljoint/anchor point. |
| Parameter 1 : | Anchor point |
| Parameter 2 : | nullvector |
| Parameter 3: | nullvector |
| Parameter 4 : | nullvector |
| Parameter 5 : | nullvector |
| Parameter 6 : | nullvector |
| Motor 1 : | not available |
| Type: |
|
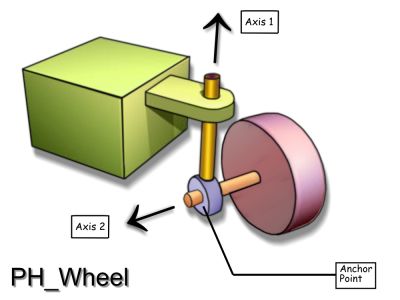
| Description : | Entities are allowed to rotate around axis 1 and axis 2. Use this constraint for setting up wheel-like behavior instead of using two separate PH_HINGEs. For a car, axis 1 is the steering axis (left/right), while axis 2 is required for forward/backward movement. Only axis 1 can have angle limits and can have its orientation queried (phcon_getposition). |
| Parameter 1 : | Anchor point |
| Parameter 2 : | Wheel axis 1 relative to first entity´s orientation, e.g. (0,0,1) |
| Parameter 3: | Wheel axis 2 relative to second entity´s orientation, e.g. (1,0,0) |
| Parameter 4 : | Allowed angles around axis1,e.g. (-45, 90, 0) sets the lower limit to -45 degrees and the upper limit around the axis to +90 degrees. Use (-360, 360, 0) to remove all limits. |
| Parameter 5 : | nullvector |
| Parameter 6 : | nullvector or spring-damper constants in the 0..100000 range, e.g. (90000,100,0) |
| Motor 1 : | Set desired angular velocity around axis1 and the maximum torque allowed to achieve this velocity, e.g. (10, 50,0) will set a desired angular velocity of 10 Hz and a maximum torque of 50,000 Nm |
| Motor 2 : | Set desired angular velocity around axis2 and the maximum torque allowed to achieve this velocity, e.g. (10, 50,0) will set a desired angular velocity of 10 Hz and a maximum torque of 50,000 Nm |
| Type: |
|
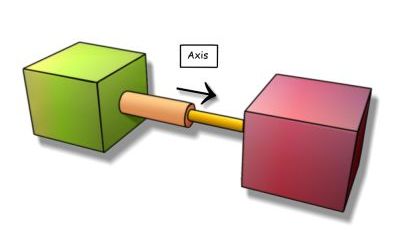
| Description : | Entities are allowed to rotate along the slider axis and move along the slider axis. Other movement is blocked. |
| Parameter 1 : | Slider axis, e.g. (0,0,1) |
| Parameter 2 : | nullvector |
| Parameter 3: | nullvector |
| Parameter 4 : | Allowed distance from original position, e.g. (-100, 1000, 0) allows the objects to slide apart by 1000 quants along the axis and 100 quants in the opposite direction, thus giving a total range of 1100 quants. |
| Parameter 5 : | nullvector |
| Parameter 6 : | nullvector |
| Motor 1 : | Set desired linear velocity (can be negative to flip direction) and the maximum force allowed to achieve this velocity, e.g. (10, 50,0) will set a desired velocity of 10 quants per second and a maximum force of 50,000 N. |